



資 訊
足式機器人 穩健探索 靈動自如 智能設備工業設計案例 | FROM ZERO TO ONE
- 來 源:智能產品設計
- 發 表 于:2025-09-19
- 作 者:admin
- 人 氣:5195
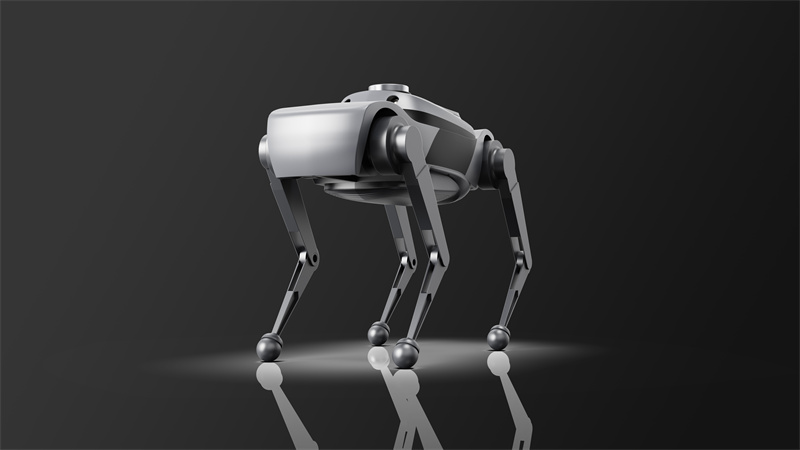
在機器人技術領域,足式機器人以其對復雜地形的適應能力,為人類在危險、未知環境中的作業提供了新的可能性。
它不只是一臺執行指令的設備,更體現了機械設計、運動控制與環境交互的技術融合
一、交互清晰,操控高效
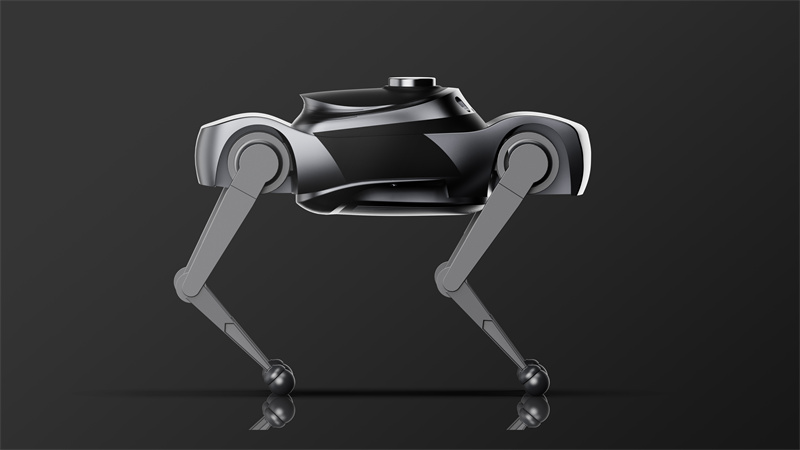
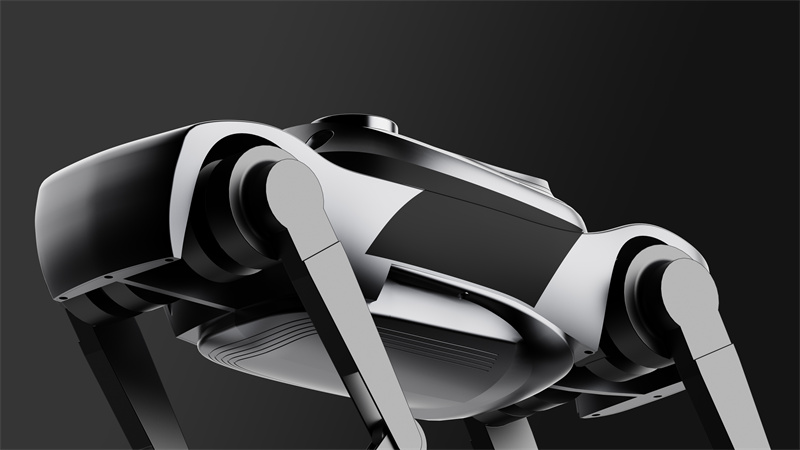
該機器人注重實際操作中的易用性與反饋有效性。頂部操控模塊布局直接,指令下達簡單,配合清晰的交互邏輯,便于使用者快速掌握。
關節部分具備運動反饋功能,可通過實時數據了解機器人運行狀態。
內置傳感器能夠感知環境變化,為路徑規劃與避障提供信息支持,提升任務執行可靠性。
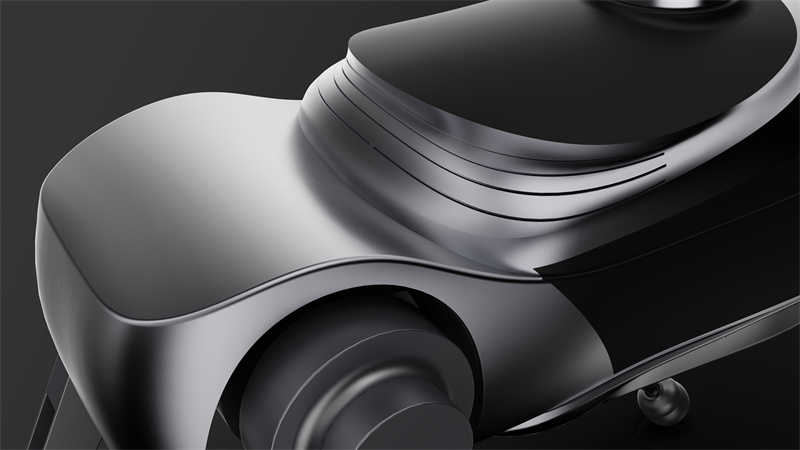
二、外觀簡潔,科技實用
整機以深色和金屬色為主,外觀簡潔且結構外露,突出機械本身的功能性和技術質感。
造型線條流暢,關節與傳動結構可見,體現出運動機器的力量與靈活性。
機身標識清晰,整體風格與科研、勘探等應用場景相協調。
三、細節務實,穩定可靠
足端采用球形設計,增強對不同地面的適應性,有助于在崎嶇或光滑表面保持穩定。
關節傳動部分具備阻尼控制,減少運動噪音,適用于需保持安靜的考察環境。
機身合理設置散熱結構,保障長時間連續工作時的性能穩定。

四、多類場景,實用為先
在野外勘探中,該機器人能夠穿越復雜地貌,協助完成數據采集與地形勘察;
在科研實驗中,它為算法測試和運動規劃提供真實實驗平臺;
在特殊作業環境中,如災害響應或設施巡檢,它可替代人力執行高風險任務,提升作業安全性。
結語:
足式機器人以其運動能力和環境適應性,擴展了自動化裝備的應用范圍。它通過實用的交互降低操作門檻,以簡潔可靠的設計支撐多樣任務,憑借細節處理提升整體穩定性,并在多個場景中發揮實際作用。它不僅是一種技術實現,更是人類應對復雜環境的工作伙伴。
101工業設計
您的支持是admin最大的動力,喜歡我們的文章嗎?請掃描下方二維碼進行關注我們哦!













